
Here's the side bracket design:
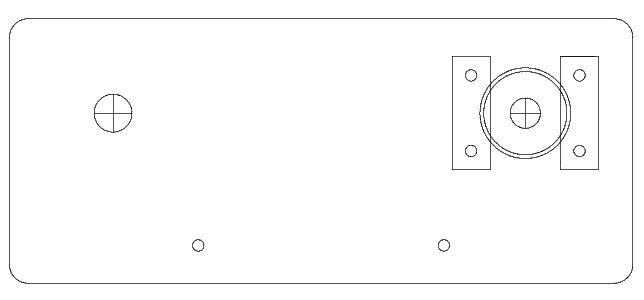
Once again I made both side brackets at the same
time by bolting them together.
Here are the finished pieces:
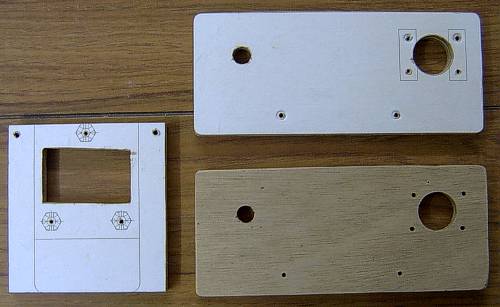
The platform is bolted to the side of the plastic carriage with aluminium plates and the Z axis was bolted to the platform while this was done to ensure alignment.
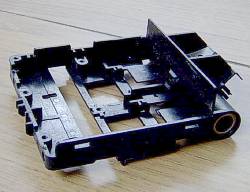
Here's the carriage before and after mounting:

Here are the finished pieces:
The platform is bolted to the side of the plastic carriage with aluminium plates and the Z axis was bolted to the platform while this was done to ensure alignment.
Here's the carriage before and after mounting:
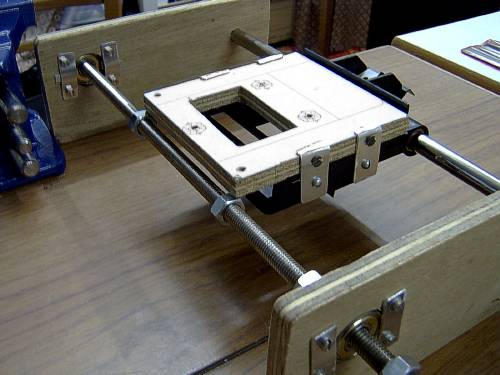
Now the Z axis is unbolted, the bearings are
fitted to the side plates, the Stylus Color stainless steel bar
inserted and we see how it fits together:
Next I make mounting brackets to hold the captive
nuts - two as before to avoid backlash. They're a nasty lash-up
and I'm not proud of them. I may well return to them one day and
replace them with something better and more importantly, stiffer.
Here they are:


Here they are:
Now I reattach the Z axis and tweak everything to
get it level:
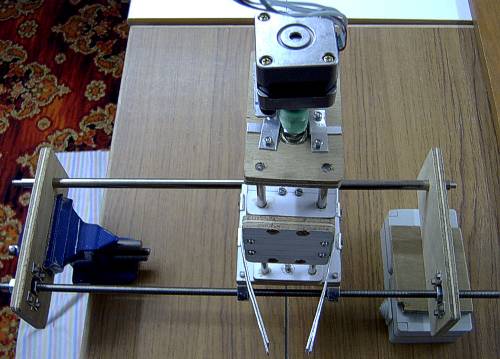
Time now to work out how high above the Y axis to
mount this. To do that I need to bolt my miniature drill to the Z
axis frontplate aluminium straps. I also screw the side plates to
a batten so that they stay upright. It turns out that another
piece of batten under either side raises the X axis by about the right
amount.
Here's the result:
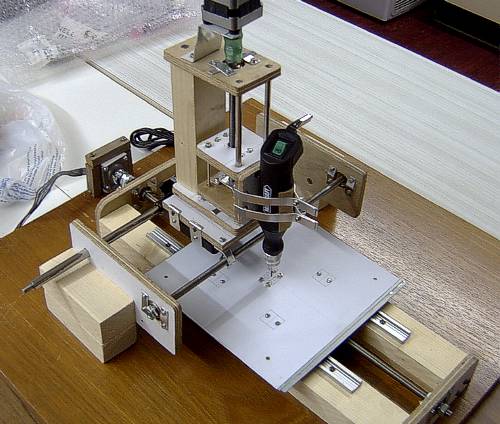
Here's the result:
Here's a close-up of the drill mounting straps:

Now I screw the bottom battens down and then screw the top battens to the bottom battens being very careful that the X axis remains perpendicular to the Y axis. In retrospect, I probably shouldn't have mounted the blocks so far apart. Despite the thickness of the 8 mm stainless steel threaded rod, it is still surprisingly flexible. I wanted to maximise the drilling area though. It's not like it sags though. A better design would probably have a second smooth 1 cm stainless steel rod, like the Stylus Color one, attached to the front of the carriage. The threaded rod would then only be used for moving the carriage and not supporting it as well.
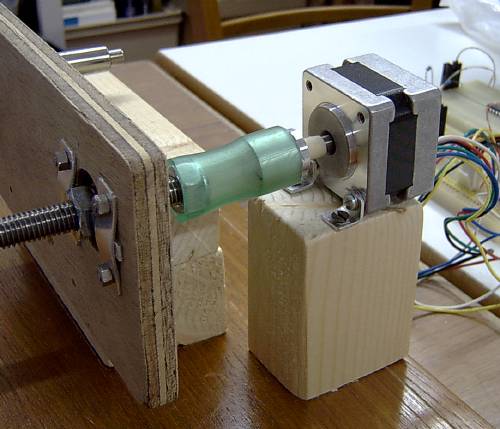
So I replace the regular nuts with lock-nuts and trim the threaded bar to the right length. Now comes my next mistake. I can turn the X axis threaded bar with my fingers but how much torque is that? I need to know because I haven't got a motor for this axis yet. I don't have any performance graphs for my existing motors so they can't help me much. I pored over datasheets, compared pull-in torques, holding torques, coil resistances, current per phase and make a stab at it. Below is the result:
Now I screw the bottom battens down and then screw the top battens to the bottom battens being very careful that the X axis remains perpendicular to the Y axis. In retrospect, I probably shouldn't have mounted the blocks so far apart. Despite the thickness of the 8 mm stainless steel threaded rod, it is still surprisingly flexible. I wanted to maximise the drilling area though. It's not like it sags though. A better design would probably have a second smooth 1 cm stainless steel rod, like the Stylus Color one, attached to the front of the carriage. The threaded rod would then only be used for moving the carriage and not supporting it as well.
So I replace the regular nuts with lock-nuts and trim the threaded bar to the right length. Now comes my next mistake. I can turn the X axis threaded bar with my fingers but how much torque is that? I need to know because I haven't got a motor for this axis yet. I don't have any performance graphs for my existing motors so they can't help me much. I pored over datasheets, compared pull-in torques, holding torques, coil resistances, current per phase and make a stab at it. Below is the result:
It's not a complete disaster. This Astrosyn
Size 14 Mini Hybrid Stepper Motor (MY5602) is very powerful for its
size. It pulls 0.76 Amps per phase at 5 Volts too. All that
current in such a small volume makes it hot - very hot.
Fortunately it is rated as having a maximum temperature rise of 80
degrees centigrade. Does it do the job though?
Almost. Despite its size, it can move the X axis with the Z axis
bolted on top most of the time. Unfortunately, most isn't going
to cut it. If the motor misses steps, the holes will get drilled
in the wrong places. At least it was a cheap motor. What it
did do though was provide me with a reference level of the required
torque. I did err on the side of caution and the motor I bought
to replace it was probably a bit of an overkill. Nevertheless, it
does the job and will probably do routing as well without any
trouble. It's an RS 440-442, has a step angle of 1.8 degrees and
pulls a maximum of 1 Amp per coil. It doesn't get as hot as the
MY5602 simply because it's much bigger.
Here is the new monster motor:
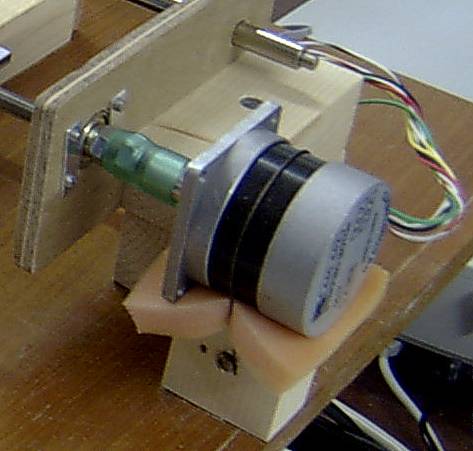
Here is the new monster motor:
That's more like it!
I performed the same calibration procedure that I did with the Y axis and it moved 80.90 mm after 26000 steps. That's roughly 3 thousandths of a millimetre per step or 321 steps per millimetre. Makes the Y axis look a bit poor! The Z axis should have the same value as the X axis since they use the same mechanism and its motor also has 1.8 degree steps.
A few more odds and ends to tidy up - I soldered the sensor circuitry onto strip board and temporarily taped them onto the X and Y axes.
The sensors:
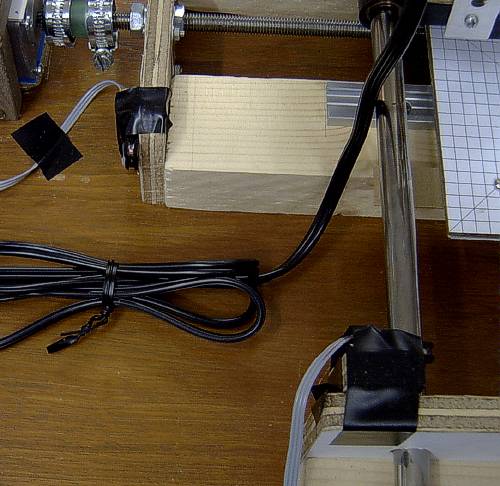
I will devise a better mounting method later. Right now it's enough to know they work and the drilling platform can work in a purely relative position mode. Once the sensors are fitted, the drilling platform will be able to know where it is in terms of absolute position. The Z depth sensor will allow it to work where the tip of the drill bit is but I'm not sure how useful that's really going to be. You can also just see the wooden plate bolted to the top of the steel plate with a grid pattern glued to the top.
Time to put the finishing touches to it...
I performed the same calibration procedure that I did with the Y axis and it moved 80.90 mm after 26000 steps. That's roughly 3 thousandths of a millimetre per step or 321 steps per millimetre. Makes the Y axis look a bit poor! The Z axis should have the same value as the X axis since they use the same mechanism and its motor also has 1.8 degree steps.
A few more odds and ends to tidy up - I soldered the sensor circuitry onto strip board and temporarily taped them onto the X and Y axes.
The sensors:
I will devise a better mounting method later. Right now it's enough to know they work and the drilling platform can work in a purely relative position mode. Once the sensors are fitted, the drilling platform will be able to know where it is in terms of absolute position. The Z depth sensor will allow it to work where the tip of the drill bit is but I'm not sure how useful that's really going to be. You can also just see the wooden plate bolted to the top of the steel plate with a grid pattern glued to the top.
Time to put the finishing touches to it...